EIGRP不会基于定期计时器发送全部或部分更新消息,因此EIGRP无法依靠更新消息来监视其邻居的状态。因此,EIGRP使用与OSPF相同的基本通信方法。hello消息。
EIGRP Hello消息和协议定义每个路由器应在每个接口上发送定期的Hello消息,以便所有EIGRP路由器都知道该路由器仍在工作。字体图像是它的简单说明。

路由器使用自己的独立Hello Interval,它定义每个EIGRP Hello消息之间的时间段。例如,路由器R1和R2不必同时发送其Hello消息。路由器还必须在一定的间隔(称为保持间隔)之后从邻居接收到Hello ,默认间隔为Hello间隔的四倍。
EIGRP不需要两个相邻的路由器使用相同的Hello和Hold计时器,但是在所有路由器上使用相同的Hello和Hold计时器是很有意义的。不幸的是,仅由于网络工程师错误地选择了Hello和Hold定时器,就可以灵活地在相邻路由器上使用不同的设置,从而阻止邻居正常工作。
例如,如果R2将其Hello / Hold间隔分别更改为30/60,但R1保持其Hello / Hold间隔为5/15秒,则R1会认为R2定期失败。R2仅每30秒发送一次Hello消息,但是R1希望在其15秒的保持间隔内接收到它们。
EIGRP邻居
一个EIGRP邻居是另一个开启EIGRP的路由器,它连接到一个公用子网,该路由器愿意与之交换EIGRP拓扑信息。EIGRP Hello消息被发送到多播IP地址224.0.0.10,以动态发现潜在的邻居。路由器通过接收Hello来学习潜在邻居。
在该路由器成为EIGRP邻居之前,路由器会对每个潜在邻居执行一些基本检查。潜在邻居是从中接收到EIGRP Hello的路由器。然后,路由器检查以下设置以确定是否应允许该路由器成为邻居:
- 如果使用,它必须通过身份验证过程。
- 它必须使用相同的已配置自治系统编号(AS)
- 邻居的Hello使用的源IP地址必须与本地路由器的接口IP地址/掩码位于同一子网中。
EIGRP中的自治系统是介于1-65535之间的数字,用于标识EIGRP进程号。
交换EIGRP拓扑信息
EIGRP使用EIGRP更新消息将拓扑信息发送给邻居。如果发送路由器需要更新同一子网上的多个路由器,则可以将这些更新消息发送到多播IP地址224.0.0.10。否则,更新将发送到特定邻居的单播IP地址。请记住,Hello消息始终仅发送到224.0.0.10多播地址。通过在LAN上使用多播数据包,EIGRP可以与LAN上的所有邻居高效交换路由信息。
EIGRP在没有UDP或TCP的情况下发送更新消息,但是它确实使用了称为可靠传输协议(RTP)的协议。RTP提供了一种机制,可以重新发送邻居未收到的任何EIGRP消息。通过使用RTP,EIGRP可以更好地避免环路,因为路由器可以确定邻居路由器已收到所有更新的路由信息。RTP的使用只是基本DV协议(如RIP)之间差异的另一个示例,RIP没有机制可以知道邻居是否收到更新消息。
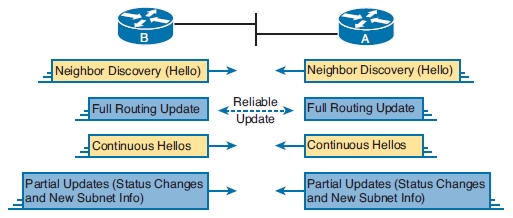
下图从上到下总结了EIGRP消息。它首先显示具有Hello的邻居发现,然后发送完整的更新,然后通过重复发送进行中的Hello和部分更新来维护邻居关系。
请注意,EIGRP将更新中交换的信息称为拓扑信息。该信息的详细程度不如OSPF LS拓扑数据,并且也不会尝试描述网络中的每个路由器和链路。
但是,它描述的不仅仅是本地路由器的距离(度量)和矢量(下一跳路由器)。本地路由器还学习下一跳路由器使用的度量。此添加的信息用于帮助EIGRP快速收敛,而不会引起循环。
